Feature
●【rosmaster r2 Version Selection】We offer three configurations for the rosmaster r2: Standard, Deluxe, and Flagship versions. Please refer to the image for the differences in configurations. Additionally, it is important to distinguish the type of development board being used, whether its a Raspberry Pi or Jetson Nano.
●【rosmaster r2 Features】This robot car kit stands out from other ROS vehicles due to its Ackermann chassis structure. The Ackermann structure is a standard design in modern automobiles, and the omnidirectional Mecanum wheels are the fundamental choice for versatile mobility. If your goal is to conduct research in autonomous driving, the rosmaster R2 is a worthy ROS robot kit to consider.
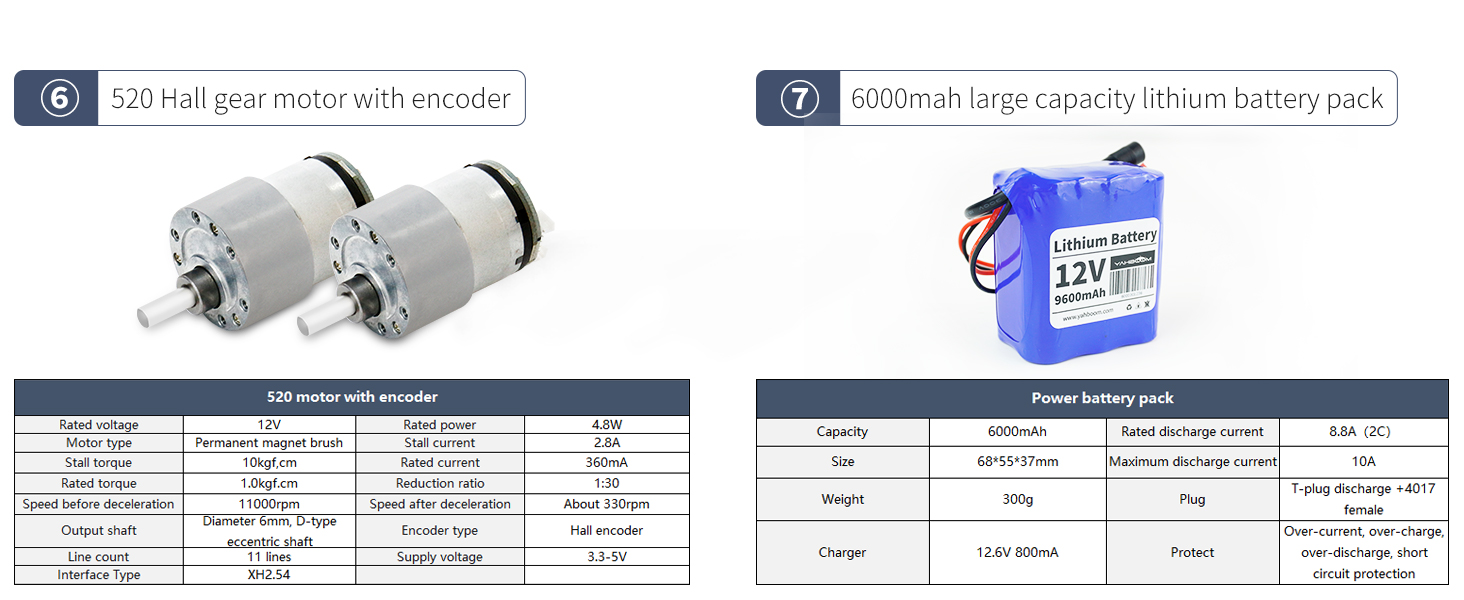
●【Hardware Configuration】Robot is constructed with aluminum alloy and incorporates various high-performance hardware components, including 520 Hall-Effect Encoder Gear Motors, omnidirectional Mecanum wheels, LiDAR, 3D depth camera, intelligent serial bus servos, multifunctional expansion board, motor drivers, and a 12V 6000mAh lithium battery. Please note that our technical support is limited to existing learning tutorials and does not provide assistance for secondary development.
●【SLAM Development and Versatile Configurations】The rosmaster r2 employs a wide range of advanced algorithms, including gmapping, hector, karto, and cartographer, enabling precise multi-point navigation, TEB path planning, and dynamic obstacle avoidance. Utilizing 3D vision, it can capture point cloud images of the environment for RTAB 3D mapping and navigation.
●【AI-Driven Intelligent ROS Robot】The rosmaster r2 is a professional robot platform designed for ROS learning and development, supporting the Robot Operating System (ROS). It utilizes mainstream deep learning frameworks in combination with MediaPipe development, supporting YOLO model training and utilizing TensorRT for acceleration. This combination offers various 3D machine vision applications, including autonomous driving, automatic grasping and transportation, and KCF object tracking.
Description


Ackerman and Autopilot
ROSMASTER R2 has an Ackerman steering structure for autonomous driving scenarios. Users can set the ROS functions into projects and scenarios through automatic driving scene settings. The car deploys Darknet YOLO to realize traffic sign recognition and detection.

Ackerman chassis structure
Ackerman steering is a modern car steering method. ROSMASTER R2 adopts aluminum alloy Ackerman chassis structure. When the R2 car turns, the angles of the inner and outer wheels are different, and the turning radius of the inner tire is smaller than that of the outer tire.